Radar System Modeling
This example shows how to set up a radar system simulation consisting of a transmitter, a channel with a target, and a receiver. For the Aerospace Defense industry, this is an important multi-discipline problem. RF Blockset™ is used for modeling the RF transmitter and receiver sections.
System Architecture
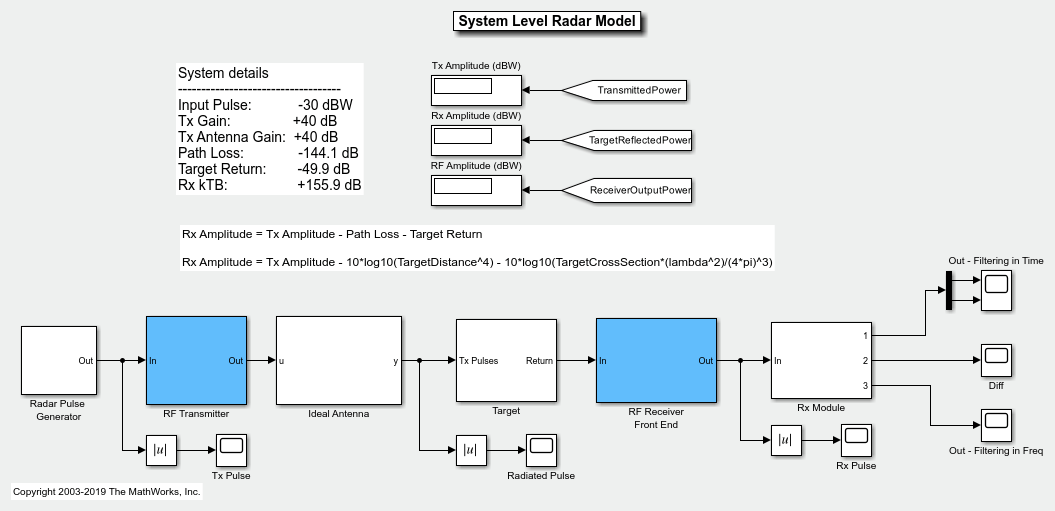
The system consists of:
A radar pulse generator, which outputs a chirp with a power of 1 mW at a 2% duty cycle (On time = 2 ms, period = 100 ms).
An RF transmitter section consisting of a filter and an Amplifier implemented using RF Blockset Circuit Envelope library blocks. Since the filter is a linear device and the amplifier is a non-linear device, they are split into two separate independent subsystems. This separation allows the use of different simulation frequency sets in each subsystem. This separation also permits a trade-off between faster simulation speed and the loss of inter-stage loading effects available in a cascaded chain.
An ideal antenna element with specified boresight gain operating at 2.1 GHz.
A moving target implementation that reflects the entire incident signal from its cross-sectional surface. The target surface is perpendicular to the incident radar pulse direction of travel.
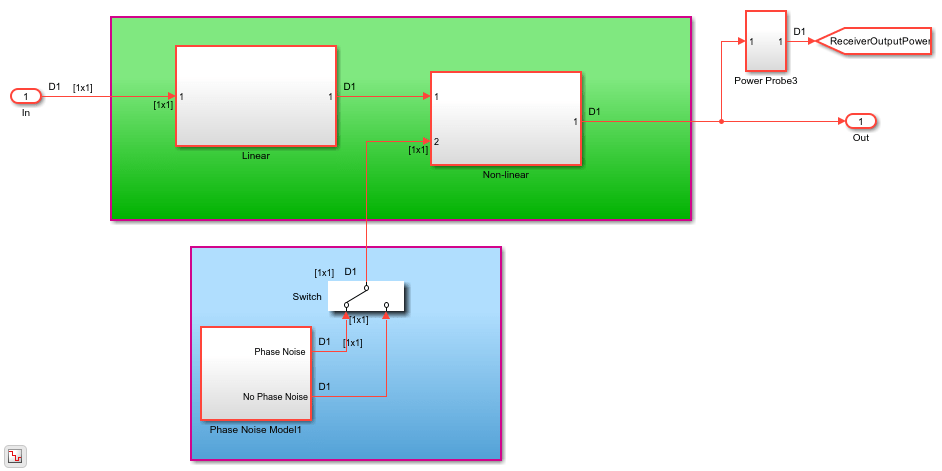
An RF Receiver built using the RF Blockset Circuit Envelope library. The direct conversion structure is implemented in the receiver together with LNA and matching networks. The LNA is describe in a touchstone file and the local oscillator includes a phase noise model. Similar to the RF transmitter section, the receiver is split into independent linear and non-linear subsystems. The matching networks, LNA and filter are in the linear section, while the Mixer and final stage amplifiers are in the non-linear section.
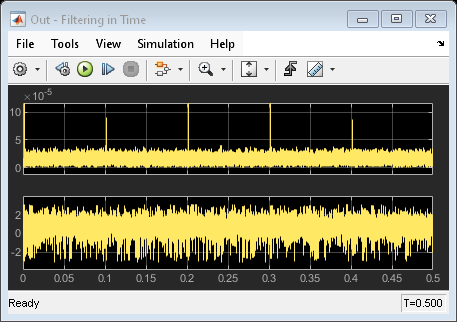
The Receive Module in this example serves two purposes. First, the module contains a matched filter detector for target detection. Second, the module serves as a testbench where a theoretical filter implementation is realized via Simulink blocks. The output of each of these filters is compared and their differences plotted.
Running Example Using Default Settings
Set the target cross section, target speed, and relative distance to the target by double-clicking the Target icon. At sufficiently large distances or if the target cross section is too small, the return signal cannot be detected because of the noise.
To start the example simulation:
Select Simulation > Run
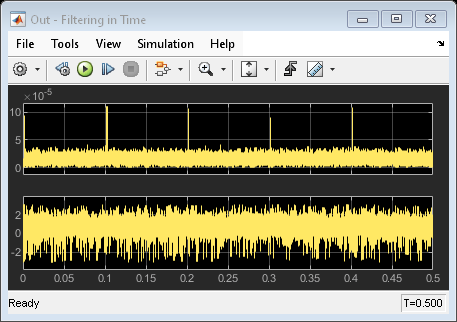
The scope output shows the results for a 0.5 second simulation, while received pulses indicate the presence of the target.
Effect of Antenna Gain/Direction
Open the 'Ideal Antenna' block and change the transmit gain to 10 dB. The target will no longer receive the signal from the main beam of the transmit antenna.
To run the example under this scenario:
Select Simulation > Run
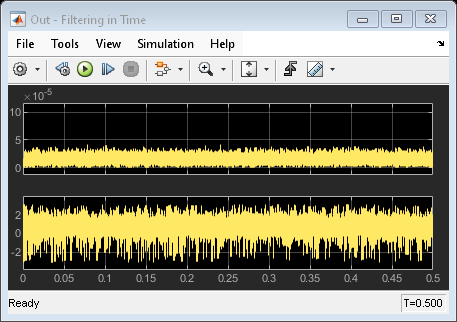
The effect of the change in antenna gain is observed in the scope. Notice that the pulses are now buried in the noise, rendering the object electromagnetically invisible.
Phase Noise Enabled On Receiver LO
Open the Receiver Front-End subsystem, and use the manual switch to include the phase noise model for the Local Oscillator.
Effect of Phase Noise
Double click on the 'Ideal Antenna' block and change the transmit gain back to 40 dB.
Select Simulation > Run
The effect of the phase noise from the Local oscillator is observed in the varying strength of the detected pulses. This varying pulse strength can have an impact on the probability of detection and will result in the target being detected only at certain times.
Related Topics
- Modeling RF Front End in Radar System Simulation (Phased Array System Toolbox)
- Radar Tracking System
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)