Lane Departure Warning System
This example shows how to detect and track road lane markers in a video sequence and notifies the driver if they are moving across a lane. The example illustrates how to use the Hough Transform, Hough Lines and Kalman Filter blocks to create a line detection and tracking algorithm. The example implements this algorithm using the following steps: 1) Detect lane markers in the current video frame. 2) Match the current lane markers with those detected in the previous video frame. 3) Find the left and right lane markers. 4) Issue a warning message if the vehicle moves across either of the lane markers.
To process low quality video sequences, where lane markers might be difficult to see or are hidden behind objects, the example waits for a lane marker to appear in multiple frames before it considers the marker to be valid. The example uses the same process to decide when to begin to ignore a lane marker.
Note: The example parameters are defined in the model workspace. To access the parameters, click View > Model Explorer. Then navigate to Model Workspace under model's name.
Watch the Lane Departure Warning System example.
Example Model
The following figure shows the Lane Departure Warning System example model:

Lane Detection Subsystem
This subsystem uses the 2-D FIR Filter and Autothreshold blocks to detect the left boundaries of the lane markers in the current video frame. The boundaries of the lane markers resemble straight lines and correspond to peak values in the Hough transform matrix. This subsystem uses the Find Local Maxima block to determine the Polar coordinate location of the lane markers.

Lane Tracking Subsystem
The example saves the previously-detected lanes in a repository and counts the number of times each lane is detected. This subsystem matches the lanes found in the current video frame with those in the repository. If a current lane is similar enough to another lane in the repository, the example updates the repository with the lanes' current location. The Kalman Filter block predicts the location of each lane in the repository, which improves the accuracy of the lane tracking.

Departure Warning Subsystem
This subsystem uses the Hough Lines block to convert the Polar coordinates of a line to Cartesian coordinates. The subsystem uses these Cartesian coordinates to calculate the distance between the lane markers and the center of the video bottom boundary. If this distance is less than the threshold value, the example issues a warning. This subsystem also determines if the line is yellow or white and whether it is solid or broken.

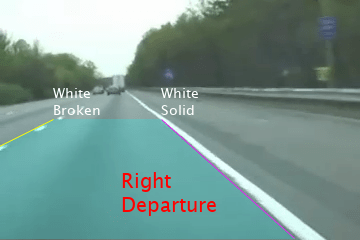
Lane Departure Warning System Results
The Safety Margin Signals window shows a plot of a safety margin metric. The safety margin metric is determined by the distance between the car and the closest lane marker. When the safety margin metric, shown in yellow, drops below 0, shown in blue, the car is in lane departure mode otherwise the car is in normal driving mode.

The Results window shows the left and right lane markers and a warning message. The warning message indicates that the vehicle is moving across the right lane marker. The type and color of the lane markers are also shown in this window. In addition to the text message, the Windows® version of the example issues an audio warning.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)